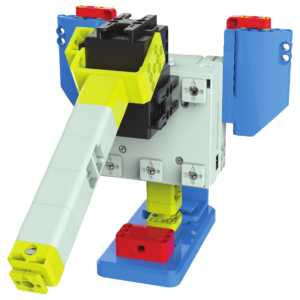
Subject 1 - ก้านยกอัตโนมัติ (⭐)

✅ ด้านวิทยาศาสตร์ (Science)
เพื่อให้สามารถระบุประเภทการเคลื่อนที่ของวัตถุและมีความเข้าใจในการเคลื่อนที่เชิงเส้น
✅ ด้านเทคโนโลยี (Technology)
เพื่อให้สามารถควบคุมการปรับทิศทางการเคลื่อนที่ของมุมและความเร็วรอบของเซอร์โวมอเตอร์
ด้วยการเชื่อมต่อบลูทูธ ระหว่างคอมพิวเตอร์และกล่องควบคุมหลัก
✅ ด้านวิศวกรรม (Engineering) เพื่อให้ทราบและเข้าใจถึงการยกและลดระดับ
ของก้านยก ผ่านการควบคุมทิศทางการเคลื่อนที่ของมุมจากเซอร์โวมอเตอร์
โดยให้สามารถหมุน ไปยังจุดที่ต้องการได้อย่างแม่นยํา
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics)
เพื่อให้ทราบและเข้าใจถึงความแตกต่างของค่าบวกและลบของมุม
ซึ่งจะช่วยให้สามารถทําการวาดเส้นโค้งได้
Subject 2 - ปากกาจับวัตถุ (⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เพื่อเรียนรู้หลักการทางกายวิภาคศาสตร์ของช่องปาก ให้สามารถนําไปประยุกต์ใช้ในการสร้างปากกา จับวัตถุของหุ่นยนต์แขนกล
✅ ด้านเทคโนโลยี (Technology) เพื่อให้ทราบและเข้าใจกลไกการอ้าปากขึ้นและปิดปากลง ให้สามารถนําไปประยุกต์ใช้กับหุ่นยนต์ได้
✅ ด้านวิศวกรรม (Engineering) เพื่อให้ทราบและเข้าใจหลักการทํางาน และหลักการเชื่อมต่อกล่องควบคุมหลักในการควบคุมการเปิดและปิดของปากกาจับวัตถุ
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics) เพื่อเรียนรู้การกำหนดค่าให้สามารถควบคุมทิศทางการหมุนและขนาดของมุม
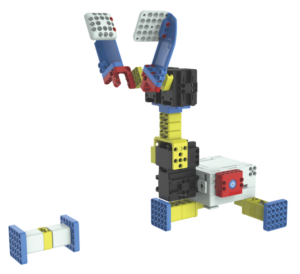
Subject 3 - ไม้กอล์ฟ (⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เพื่อให้เข้าใจหลักการของแรงและผลที่เกิดขึ้นกับการเคลื่อนที่ของวัตถุ
✅ ด้านเทคโนโลยี (Technology) เพื่อเรียนรู้วิธีการควบคุมทิศทางการหมุนและการกำหนดเวลาในการบังคับของเซอร์โวมอเตอร์
✅ ด้านวิศวกรรม (Engineering) เพื่อให้สามารถควบคุมทิศทางการหมุนตามเข็มนาฬิกา หรือทวนเข็มนาฬิกา และสร้างชุดคําสั่งให้ไม้กอล์ฟตีลูกได้
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics) เพื่อเรียนรู้และเข้าใจหลักการวัดระยะ
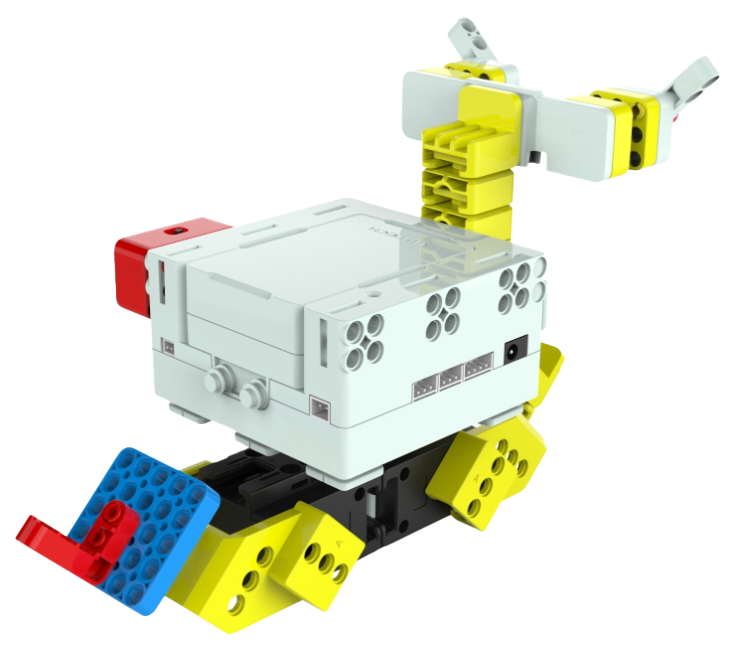
Subject 4 - หุ่นยนต์ช้างน้อย (⭐⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เพื่อให้ทราบและเข้าใจหลักการเคลื่อนที่ทางกายวิภาคศาสตร์ของสัตว์เลี้ยงลูกด้วยนม เช่น โครงกระดูก ข้อต่อ และกล้ามเนื้อ
✅ ด้านเทคโนโลยี (Technology) เพื่อให้สามารถควบคุมทิศทางการหมุนและขนาดของมุม ในการทํางานร่วมกันระหว่างเซอร์โวมอเตอร์ 2 ตัว
✅ ด้านวิศวกรรม (Engineering) เพื่อจําลองการเคลื่อนที่ของงวงช้างผ่านการควบคุมทิศทางการหมุนและขนาดของมุม ซึ่งเป็นการทํางานร่วมกันระหว่างเซอร์โวมอเตอร์ 2 ตัว
✅ ด้านศิลปะ (Art) เพื่อให้สามารถออกแบบสื่อสารและอธิบายลักษณะการจําลองการ เคลื่อนที่ของหุ่นยนต์ได้ หากมีการประยุกต์กลายเป็นหุ่นยนต์แขนกลในอนาคต
✅ ด้านคณิตศาสตร์ (Mathematics) เพื่อให้เข้าใจแนวคิดเบื้องต้นเกี่ยวกับระนาบและมุม เพื่อให้ทราบถึงหลักการคํานวณ จํานวนกระดูกของนิ้วมือด้วยการใช้เครื่องหมายทางคณิตศาสตร์
Subject 5 - หอยทาก (⭐⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science)
- เพื่อให้เข้าใจแหล่งกําเนิดแสงและความสัมพันธ์ระหว่างแสงกับสี
- เพื่อให้เข้าใจการดูดซับแสงและการหักเห
- เพื่อให้เข้าใจองค์ประกอบของแสงธรรมชาติ
- เพื่อให้เข้าใจสามแม่สี
✅ ด้านเทคโนโลยี (Technology)
- เพื่อให้คุ้นเคยในการเขียนโปรแกรมด้วยบล็อกคําสั่งการทํางานซ้ํา
- เพื่อให้คุ้นเคยและเชี่ยวชาญในการเขียนโปรแกรมด้วยบล็อกคําสั่งหน่วงเวลา
✅ ด้านวิศวกรรม (Engineering)
- เพื่อศึกษาสีของไฟ LED
- เพื่อให้มีความชํานาญในวิธีการควบคุมสีไฟ LED
✅ ด้านศิลปะ (Art)
- เพื่อศึกษาโครงสร้างการส่องสว่างของแสง
- เพื่อศึกษาการออกแบบไฟรูปแบบต่าง ๆ
✅ ด้านคณิตศาสตร์ (Mathematics)
- เพื่อให้สามารถวัดขนาดมุมได้อย่างเชี่ยวชาญ
Subject 6 - งู (⭐⭐⭐)
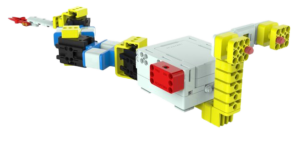
✅ ด้านวิทยาศาสตร์ (Science) เพื่อเรียนรู้เข้าใจถึงปัจจัยที่ส่งผลต่อแรงเสียดทาน ความไม่เรียบของพื้นผิวสัมผัส
✅ ด้านเทคโนโลยี (Technology) เพื่อให้สามารถปรับและควบคุมการหมุน โดยการร่วมเคลื่อนที่ของเซอร์โวมอเตอร์ 3 ตัว
✅ ด้านวิศวกรรม (Engineering) เพื่อให้เลียนแบบการเคลื่อนที่ของงู โดยการร่วมเคลื่อนที่ของเซอร์โวมอเตอร์ 3 ตัว
✅ ด้านศิลปะ (Art) เพื่อออกแบบและตกแต่งหัวและหางของงู
✅ ด้านคณิตศาสตร์ (Mathematics) กำหนดองศาและความเร็วในการเคลื่อนที่ของงู
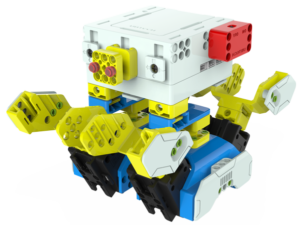
Subject 7 - ไดโนเสาร์ (⭐⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เพื่อให้เข้าใจและสามารถวิเคราะห์ลําดับการเคลื่อนไหวของแขนขาระหว่างการเดิน และการวิ่งของสัตว์สี่เท้า
✅ ด้านเทคโนโลยี (Technology) เพื่อให้เข้าใจถึงการควบคุมทิศทางและขนาดของมุม (ค่าบวกและลบ) ของเซอร์โวมอเตอร์ซึ่งส่งผลต่อลักษณะท่าทางของหุ่นยนต์ และสามารถทําการบันทึกท่าทางนั้นได้อย่างถูกต้อง
✅ ด้านวิศวกรรม (Engineering) เพื่อให้หุ่นยนต์สามารถเลียนแบบท่าทางของสัตว์สี่เท้า 3 ลักษณะ คือ การเดิน การวิ่ง และการเดินในแนวทแยง โดยใช้การควบคุมด้วยเซอร์โวมอเตอร์ทั้งหมดสี่ตัว
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่งไดโนเสาร์
✅ ด้านคณิตศาสตร์ (Mathematics) เพื่อให้เข้าใจแนวคิดและการคำนวณของเส้นทแยงมุม
Subject 8 - หุ่นยนต์ตำรวจจราจร (⭐⭐⭐)
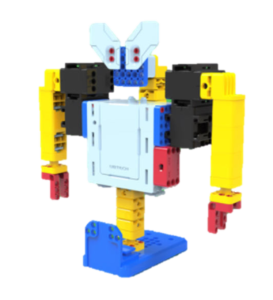
✅ ด้านวิทยาศาสตร์ (Science) เรียนรู้เกี่ยวกับองค์ประกอบและหลักการของสัญญาณไฟจราจร
✅ ด้านเทคโนโลยี (Technology) เรียนรู้เกี่ยวกับความสัมพันธ์ของมุม
✅ ด้านวิศวกรรม (Engineering) เรียนรู้เกี่ยวกับการเขียนโปรแกรมเชิงตรรกะ
✅ ด้านศิลปะ (Art) สามารถควบคุมการเคลื่อนไหวของแขนทั้งสองของหุ่นยนต์ตำรวจจราจรได้ในเวลาเดียวกัน
✅ ด้านคณิตศาสตร์ (Mathematics) มีความเข้าใจเกี่ยวกับตำรวจรักษาความปลอดภัยประเภทต่างๆ เข้าใจเกี่ยวกับการพัฒนาระบบการจราจรและวางแผนการจราจร
Subject 9 - หุ่นยนต์ยกน้ำหนัก (⭐⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เรียนรู้เกี่ยวกับน้ำหนักและความสมดุล
✅ ด้านเทคโนโลยี (Technology) การเขียนโปรแกรมควบคุมเซอร์โวให้ทั้ง 4 ตัว
✅ ด้านวิศวกรรม (Engineering) เพื่อให้เข้าใจถึงเรื่องแรงเสียดทาน
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics) คำนวณองศาในการจัดวาง
Subject 10 - หมึกยักษ์ตัวจิ๋ว (⭐⭐⭐⭐)
✅ ด้านวิทยาศาสตร์ (Science) เพื่อให้เข้าใจหลักการของแรงโน้มถ่วง
✅ ด้านเทคโนโลยี (Technology) เพื่อให้เข้าใจการใช้บล็อกชิ้นส่วนแบบมีรูและ ช่องต่อที่ใช้ต่อประกอบเข้ากับเซอร์โวมอเตอร์ทั้ง 3 แบบ
✅ ด้านวิศวกรรม (Engineering) เพื่อให้เข้าใจการควบคุมทิศทางและขนาดมุม ของเซอร์โวมอเตอร์ที่ทําให้จุดศูนย์ถ่วงของหุ่นยนต์เปลี่ยนไป
✅ ด้านศิลปะ (Art) เพื่อให้ทราบถึงหลักการสมมาตรของวัตถุในการออกแบบและสร้างสรรค์หุ่นยนต์
✅ ด้านคณิตศาสตร์ (Mathematics) เพื่อให้เข้าใจการสมมาตรแกนของวัตถุ
Subject 11 - คนแคระ (⭐⭐⭐⭐⭐)
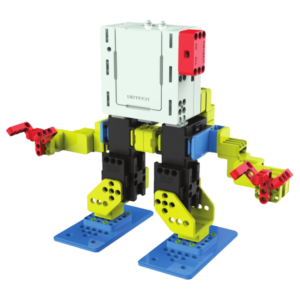
✅ ด้านวิทยาศาสตร์ (Science) เพื่อให้เข้าใจการเคลื่อนไหวของข้อต่อบริเวณขา และให้ทราบถึงการเปลี่ยน จุดศูนย์ถ่วงของร่างกายขณะเดินผ่านการวิเคราะห์ท่าเดินของหุ่นยนต์
✅ ด้านเทคโนโลยี (Technology) เพื่อให้เข้าใจถึงผลการปรับค่าบวกและลบของมุมของเซอร์โวมอเตอร์ที่ส่งผลกระทบข้อ ต่อบริเวณขาของหุ่นยนต์ และสามารถทําการบันทึกท่าทางนั้นได้อย่างถูกต้อง
✅ ด้านวิศวกรรม (Engineering) เพื่อให้สามารถเลียนแบบท่าทางการเดินสองขาได้ โดย ใช้การควบคุมด้วยเซอร์โวมอเตอร์ทั้งหมด 4 ตัว
✅ ด้านศิลปะ (Art) การออกแบบและสร้างสรรค์หุ่นยนต์
✅ ด้านคณิตศาสตร์ (Mathematics) กำหนดเวลาในการเดิน
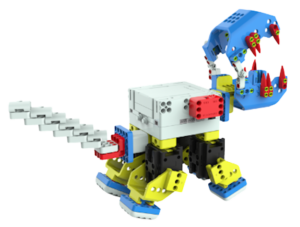
Subject 12 - หุ่นยนต์แมงป่อง (⭐⭐⭐⭐⭐)
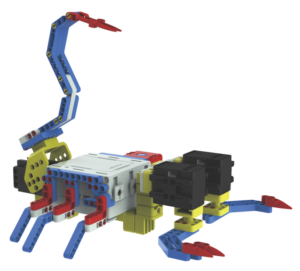
✅ ด้านวิทยาศาสตร์ (Science) ศึกษาเรียนรู้การกระทำของแมลงป่องเมื่อเจอเหยื่อ
✅ ด้านเทคโนโลยี (Technology) เรียนรู้เกี่ยวกับการเขียนโปรแกรมเชิงตรรกะ
✅ ด้านวิศวกรรม (Engineering) เพื่อให้สามารถเลียนแบบพฤติกรรมการต่อสู้และป้องกันตัวของแมลงป่อง
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics) กำหนดมุมและองศาของเซอร์เวอร์มอเตอร์
Subject 13 - มินิพัดลม (⭐⭐⭐⭐⭐)
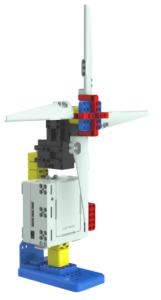
✅ ด้านวิทยาศาสตร์ (Science) ศึกษาการทำงานของพัดลมไฟฟ้า
✅ ด้านเทคโนโลยี (Technology) เรียนรู้เกี่ยวกับการเขียนโปรแกรมเชิงตรรกะ
✅ ด้านวิศวกรรม (Engineering) เรียนรู้เกี่ยวกับการหมุนของใบพัดและมอเตอร์พัดลม
✅ ด้านศิลปะ (Art) ออกแบบและตกแต่ง
✅ ด้านคณิตศาสตร์ (Mathematics) คำนวณค่าความเร็วในการหมุน